Over the years I’ve built several FPV racing quadcopters. My current fleet looks something like this:

My first setup included ever:
- DYS 1806 motors
- AfroESC 12A ESC’s with SimonK firmware
- Naze 32 Flight Controller
- Turnigy Nano-Tech 45C 1300mAh batteries
- Hobbyking FPV Camera starter kit

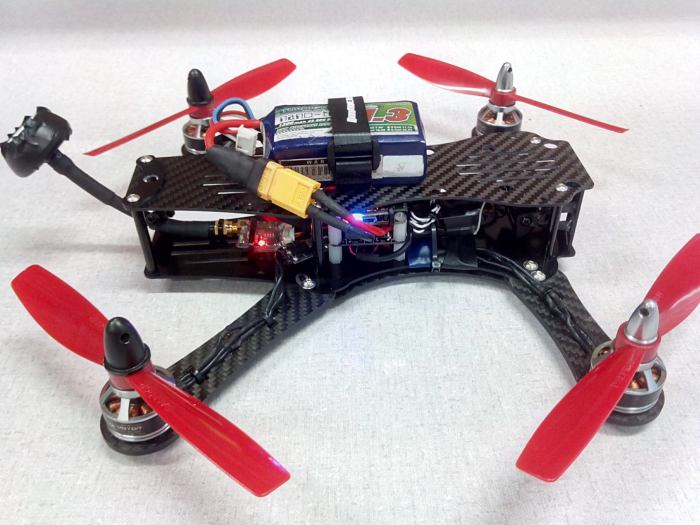
The second quad I built was a a variation with the diatone frame, in an attempt to build a warp-quad (a very, very fast quadcopter) with my newly acquired 2206 Tiger Motors, as shown below:

The third multirotor I built was a tricopter. I had access to a friend’s 3D printer and from that point on it felt like the world was my oyster. I was curious to see what the flight characteristics of a tricopter would feel like, so I nonchalantly printed one, and many hours later it was up in the air:
You can find the design on Thingiverse: http://www.thingiverse.com/make:143530

After realising that my motors were a little bit too powerful for the tricopter setup, I opted for a V-Tail, a quadcopter design that has enhanced yaw-control. Despite the awesome look, there aren’t many tutorials or details on tuning setups for this design, so getting it to fly properly was quite a challenge.
You can find the design on Thingiverse: http://www.thingiverse.com/thing:596820

My newest quadcopter is the EchoQuad 270, the frame is designed locally by a legend called Saadiq. FlyingRobot and EchoQuad have done an exceptional job of furthering the FPV racing scene in South Africa, and I commend them for that.
The setup on the EchoQuad quadcopter is as follows:
- Tiger Motor 2206 2000kv Motors
- ZTW Spider 18A Lite Opto ESCs
- 1.2 Ghz VTx
- Naze 32 Flight Controller
- Turnigy Nano-Tech 45C 1300mAh batteries
- Hobbyking FPV Camera starter kit



I recently got sponsored by Drone X Labs in Australia. They sent me enough parts to build two fully functional racing quads with their DXL Hyper X Frame:




